Method for fast camera pose refinement for wide area motion imagery
Seetharaman; Gunasekaran, Palaniappan; Kannappan, Akbarpour; Hadi Ali
Patent Number
9959625
Issue Date
2018-05-01
Patent Link
https://patents.google.com/patent/US9959625/en?oq=9959625
Abstract
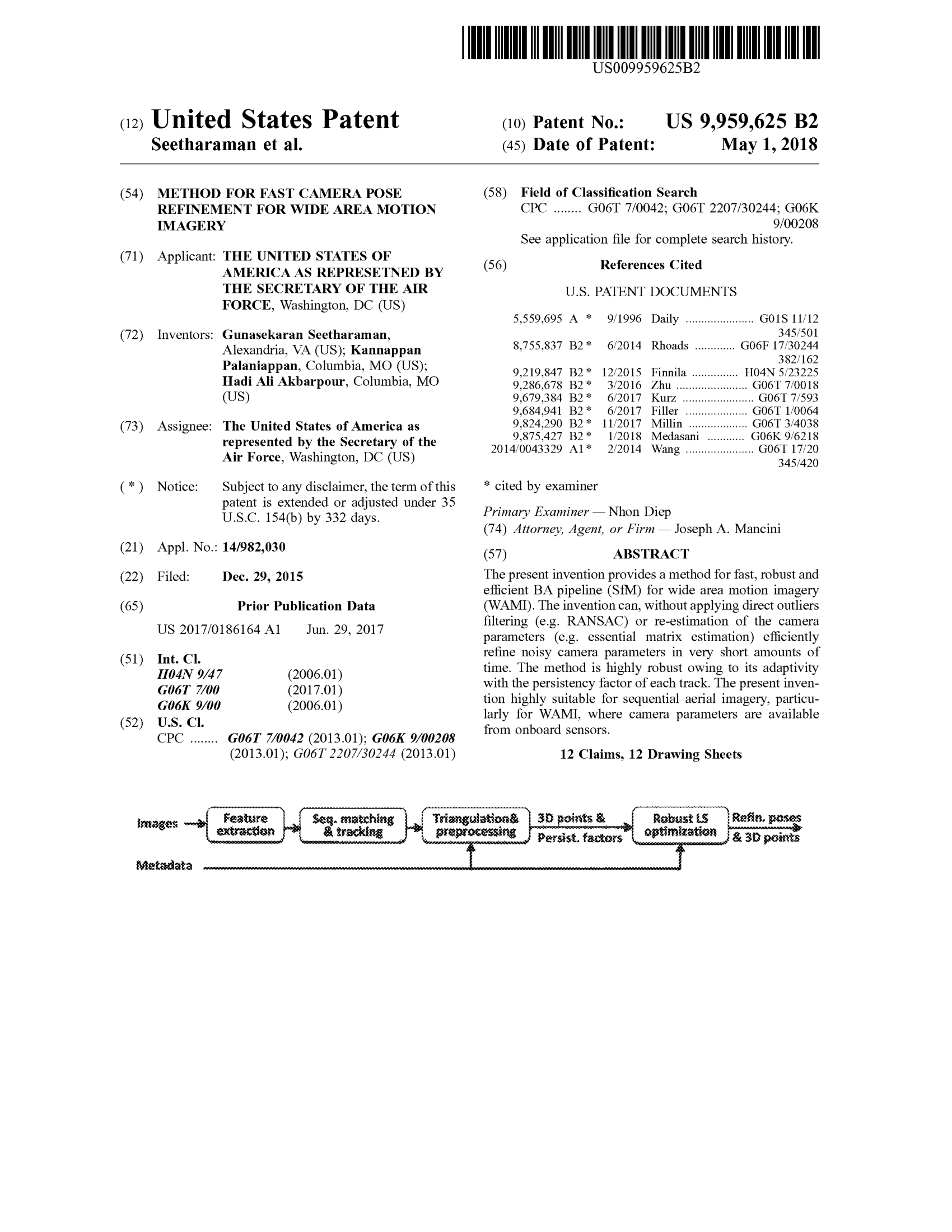
The present invention provides a method for fast, robust and efficient BA pipeline (SfM) for wide area motion imagery (WAMI). The invention can, without applying direct outliers filtering (e.g. RANSAC) or re-estimation of the camera parameters (e.g. essential matrix estimation) efficiently refine noisy camera parameters in very short amounts of time. The method is highly robust owing to its adaptivity with the persistency factor of each track. The present invention highly suitable for sequential aerial imagery, particularly for WAMI, where camera parameters are available from onboard sensors.
Description
BACKGROUND OF THE INVENTION Bundle adjustment (BA) is an essential part of Structure from Motion (SfM) and Multi-View-Stereo (MVS) 3D reconstruction. In aerial photogrammetry and computer vision, it is essential to have the camera poses refined, in order to perform any further processing of the imagery data. BA is the most popular solution and a gold standard [1], [2] to obtain precise camera poses. It receives initial estimates of camera poses and minimizes the errors based on some cost functions [3]. Despite many reports presented in this old area of research, BA is still a bottleneck in related applications. Mostly, initial camera poses (inputs to BA) are obtained through applying a RANSAC-based model estimation algorithm (e.g. Five-Point algorithm [4]-[6]). However, nowadays in aerial imagery systems, these parameters are often available and known as a priori which can be directly measured with on-board sensors (GPS and IMU). Nevertheless, these parameters are too noisy [7] and must be refined before being used in the downstream processing stages (e.g. 3D reconstruction) Wherever the term `BA pipeline` is used herein it refers to an end-to-end BA system (or SfM) whose inputs are raw images and outputs are refined camera poses and 3D point cloud. Likewise, when the term `BA` is used it will refer to just the optimization stage where initial camera poses and point cloud are already available. In the computer vision community, camera parameters are known as intrinsic and extrinsic. In photogrammetry, the same parameters are known as interior and exterior parameters. Having precise values of these parameters are very crucial for relevant applications (e.g. 3D reconstruction). BA is considered as the gold standard for refinement [1], [2], [11] of camera parameters. It is a classical and well-studied problem in computer vision and photogrammetry dating back more than three decades [3], [11]. A comprehensive introduction to BA can be found in [3] which covers a wide spectrum of topics involved in BA. Due to recent interest in large scale 3D reconstruction from consumer photos as well as aerial imagery there have been renewed interests in making BA robust, stable and accurate [5], [12]-[15]. Recently, several BA methods have been proposed, such as Sparse BA [16], [17], incremental BA [8] and Parallel BA [18], [19]. Several methods of BA have been compared in [13] while proposing some new methods which lead to better BA in terms of computation and convergence. There have been many reports presenting the use of GPS and IMU measurements for refining camera parameters. However, to the best of knowledge, so far such measurements have been mostly used as complementary values and just together with other pose estimation methods through essential matrix estimation (in computer vision) [8], [9] or resectioning in photogrammetry. E.g., in [8], [9], [20], [21], available GPS and IMU measurement are fused with SfM approach using Extended Kalman Filter (EKF) or/and as extra constraints in BA. A SfM method, called Mavmap, is proposed in [10] which leverages the temporal consistency of aerial images and availability of metadata to speed up the performance and robustness. In [10], VisualSFM [18] has been considered as the most advanced and publicly available system for automated and efficient 3D reconstruction from images. However, as stated in [10], it has no integration of IMU priors. OBJECTS AND SUMMARY OF THE INVENTION The present invention relates generally to a novel BA pipeline to refine noisy camera parameters available from platform sensors. In the present invention, approximate sensor measurements are directly used as initial values for BA. Moreover the invention does not require the application of any early-stage filtering method (e.g. no RANSAC nor its variations) to eliminate outliers. It is an object of the present invention to provide a method for camera pose refinement where approximate cameral parameters from low precision sensors can be used as initialization values in structure from motion 3D reconstruction. It is another object of the present invention to provide a method for camera pose refinement where putative matches obtained from a sequential matching paradigm can be used as observation and initial 3D points. It is yet another object of the present invention to provide a method for accurate or camera pose refinement where approximate and noisy camera parameters and unfiltered putative matches are directly fed into the process. It is yet still another object of the present invention to provide a method for camera pose refinement that adapts to the occurrence of outliers using statistics extracted from feature tracks. In an embodiment of the present invention, a method for camera pose refinement in three dimensional reconstruction of sequential frames of imagery of an image, comprises the steps of acquiring camera metadata, where the metadata comprises camera position metadata and camera orien
Image